Simulation of Autonomous Mobile Robot in Warehouse
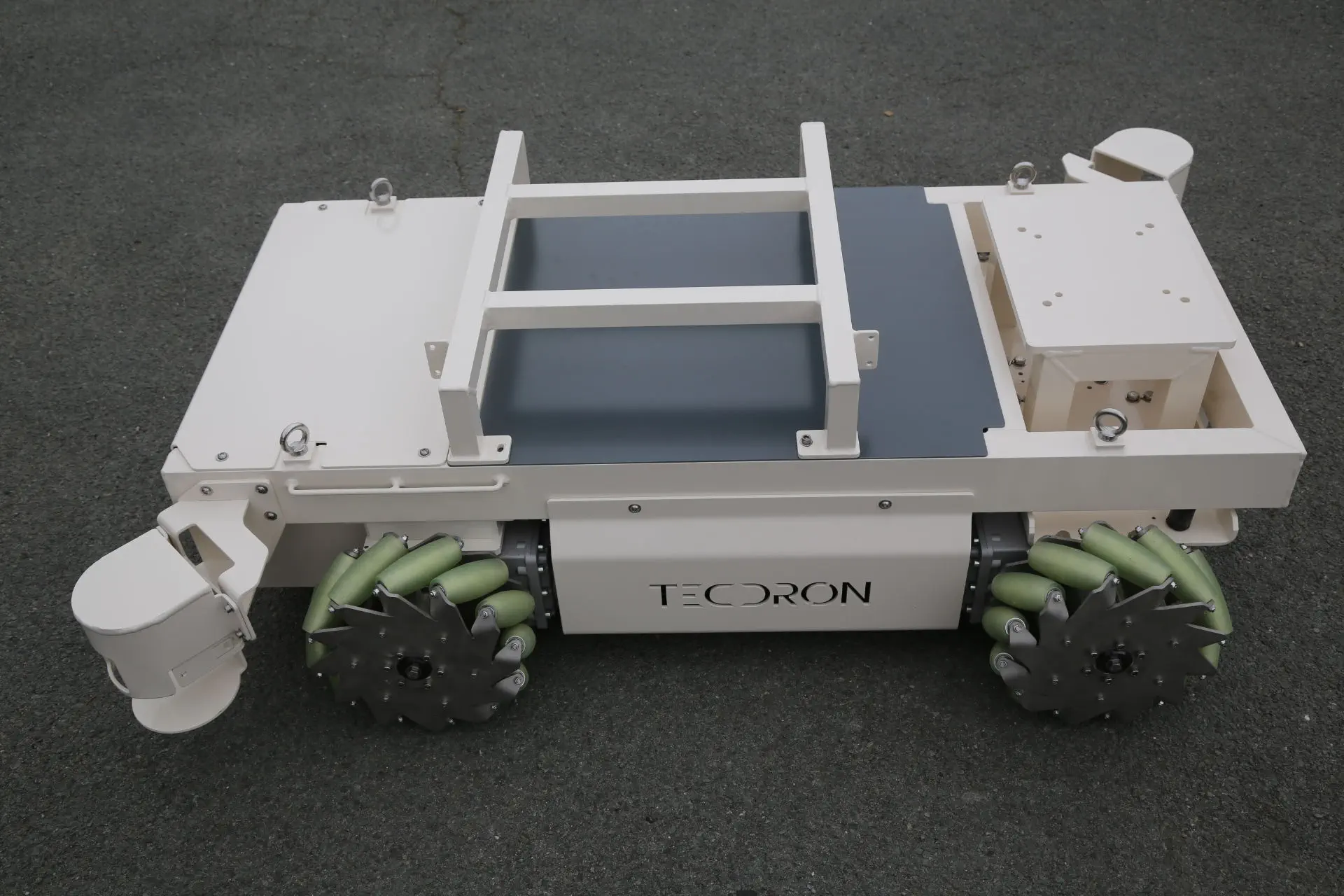
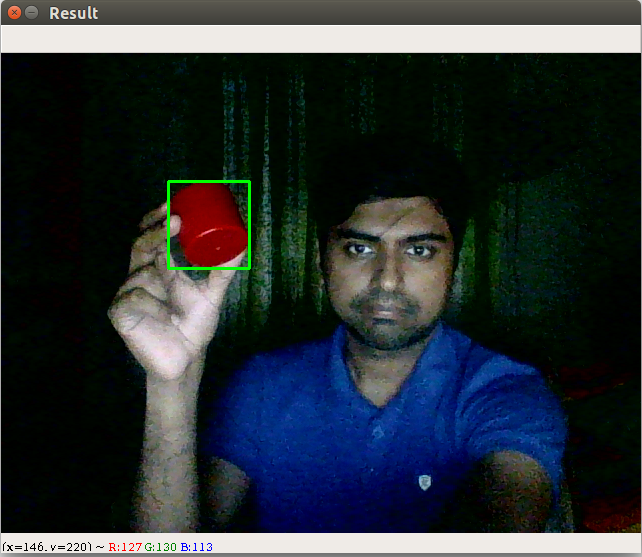
The utilisation of the TC200 Autonomous Mobile Robot (AMR) brings autonomous navigation to the forefront. This enables the robot to autonomously traverse the warehouse, deftly avoiding obstacles while optimising path planning. By automating navigation, this project eliminates the need for manual laborious tasks and reduces the risk of human errors, significantly enhancing warehouse productivity. Object tracking, the project's second key component, leverages advanced computer vision algorithms and sensors like a camera and LIDAR to precisely detect and monitor objects, particularly coloured storage bins. This innovation streamlines the retrieval process, making it faster and more efficient. It also minimises errors in object identification, contributing to the project's overall accuracy.